opencv多幅图像拼接算法(python 图像拼接)
先来看看OpenCV官方的例子得到效果是非常的好,输入的images如下:

效果:

#Stitcher类与detail命名空间
OpenCV提供了高级别的函数封装在Stitcher类中,使用很方便,不用考虑太多的细节。
低级别函数封装在detail命名空间中,展示了OpenCV算法实现的很多步骤和细节,使熟悉如下拼接流水线的用户,方便自己定制。

可见OpenCV图像拼接模块的实现是十分精密和复杂的,拼接的结果很完善,但同时也是费时的,完全不能够实现实时应用。
我在研究detail源码时,由于水平有限,并不能自由灵活地对各种部件取其所需,取舍随意。
官方提供的stitching和stitching_detailed使用示例,分别是高级别和低级别封装这两种方式正确地使用示例。两种结果产生的拼接结果相同,后者却可以允许用户,在参数变量初始化时,选择各项算法。如下所示:
这涉及到以下算法流程:
命令行调用程序,输入源图像以及程序的参数
特征点检测,判断是使用surf还是orb,默认是surf。
对图像的特征点进行匹配,使用最近邻和次近邻方法,
将两个最优的匹配的置信度保存下来。
对图像进行排序以及将置信度高的图像保存到同一个集合中,
删除置信度比较低的图像间的匹配,得到能正确匹配的图像序列。
这样将置信度高于门限的所有匹配合并到一个集合中。
对所有图像进行相机参数粗略估计,然后求出旋转矩阵
使用光束平均法进一步精准的估计出旋转矩阵。
波形校正,水平或者垂直
拼接
融合,多频段融合,光照补偿。
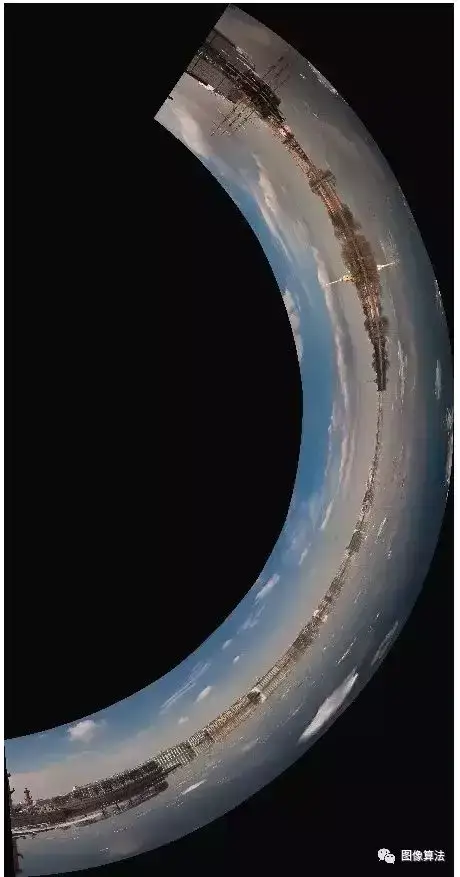
另外在拼接的时候可以设置不同warper,这样会对拼接之后的图像生成不同效果,常见的效果包括
- 鱼眼相机
- 环视(平面曲翘)
- 默认
如下图所示:

代码演示:
#include#includeusing namespace cv;
using namespace std;
int main(int argc, char** argv) {
vectorfiles;
glob("D:/images/zsxq/1", files);
vectorimages;
for (int i = 0; i < files.size(); i ) {
printf("image file : %s \n", files[i].c_str());
images.push_back(imread(files[i]));
}
// 设置拼接模式与参数
Mat result1, result2, result3;
Stitcher::Mode mode = Stitcher::PANORAMA;
Ptrstitcher = Stitcher::create(mode);
// 拼接方式-多通道融合
auto blender = detail::Blender::createDefault(detail::Blender::MULTI_BAND);
stitcher->setBlender(blender);
// 拼接
Stitcher::Status status = stitcher->stitch(images, result1);
// 平面曲翘拼接
auto plane_warper = makePtr();
stitcher->setWarper(plane_warper);
status = stitcher->stitch(images, result2);
// 鱼眼拼接
auto fisheye_warper = makePtr();
stitcher->setWarper(fisheye_warper);
status = stitcher->stitch(images, result3);
// 检查返回
if (status != Stitcher::OK)
{
cout << "Can't stitch images, error code = " << int(status) << endl;
return EXIT_FAILURE;
}
imwrite("D:/result1.png", result1);
imwrite("D:/result2.png", result2);
imwrite("D:/result3.png", result3);
waitKey(0);
return 0;
}
在来看一组输入4张图像,每张分辨率为327*245,总的拼接时间为9.25s。




演示代码:
#include#include#include#include "opencv2/opencv_modules.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/stitching/detail/autocalib.hpp"
#include "opencv2/stitching/detail/blenders.hpp"
#include "opencv2/stitching/detail/camera.hpp"
#include "opencv2/stitching/detail/exposure_compensate.hpp"
#include "opencv2/stitching/detail/matchers.hpp"
#include "opencv2/stitching/detail/motion_estimators.hpp"
#include "opencv2/stitching/detail/seam_finders.hpp"
#include "opencv2/stitching/detail/util.hpp"
#include "opencv2/stitching/detail/warpers.hpp"
#include "opencv2/stitching/warpers.hpp"
using namespace std;
using namespace cv;
using namespace cv::detail;
//
#define ENABLE_LOG 1
// Default command line args
vectorimg_names;
bool preview = false;
bool try_gpu = true;
double work_megapix = 0.6;
double seam_megapix = 0.1;
double compose_megapix = -1;
float conf_thresh = 1.f;
string features_type = "surf";
string ba_cost_func = "ray";
string ba_refine_mask = "xxxxx";
bool do_wave_correct = true;
WaveCorrectKind wave_correct = detail::WAVE_CORRECT_HORIZ;
bool save_graph = false;
std::string save_graph_to;
string warp_type = "spherical";
int expos_comp_type = ExposureCompensator::GAIN_BLOCKS;
float match_conf = 0.3f;
string seam_find_type = "gc_color";
int blend_type = Blender::MULTI_BAND;
float blend_strength = 5;
string result_name = "result.jpg";
int main(int argc, char* argv[])
{
//读入图像
double ttt = getTickCount();
img_names.push_back("E:/workspace/iamge/dataset/yard1.jpg");
img_names.push_back("E:/workspace/iamge/dataset/yard2.jpg");
img_names.push_back("E:/workspace/iamge/dataset/yard3.jpg");
img_names.push_back("E:/workspace/iamge/dataset/yard4.jpg");
#if ENABLE_LOG
int64 app_start_time = getTickCount();
#endif
cv::setBreakOnError(true);
/*int retval = parseCmdArgs(argc, argv);
if (retval)
return retval;*/
// Check if have enough images
int num_images = static_cast(img_names.size());
if (num_images < 2)
{
LOGLN("Need more images");
return -1;
}
double work_scale = 1, seam_scale = 1, compose_scale = 1;
bool is_work_scale_set = false, is_seam_scale_set = false, is_compose_scale_set = false;
LOGLN("Finding features...");
#if ENABLE_LOG
int64 t = getTickCount();
#endif
Ptrfinder;
if (features_type == "surf")
{
#if defined(HAVE_OPENCV_NONFREE) && defined(HAVE_OPENCV_GPU)
if (try_gpu && gpu::getCudaEnabledDeviceCount() > 0)
finder = new SurfFeaturesFinderGpu();
else
#endif
finder = new SurfFeaturesFinder();
}
else if (features_type == "orb")
{
finder = new OrbFeaturesFinder();
}
else
{
cout << "Unknown 2D features type: '" << features_type << "'.\n";
return -1;
}
Mat full_img, img;
vectorfeatures(num_images);
vectorimages(num_images);
vectorfull_img_sizes(num_images);
double seam_work_aspect = 1;
for (int i = 0; i < num_images; i)
{
full_img = imread(img_names[i]);
full_img_sizes[i] = full_img.size();
if (full_img.empty())
{
LOGLN("Can't open image " << img_names[i]);
return -1;
}
if (work_megapix < 0)
{
img = full_img;
work_scale = 1;
is_work_scale_set = true;
}
else
{
if (!is_work_scale_set)
{
work_scale = min(1.0, sqrt(work_megapix * 1e6 / full_img.size().area()));
is_work_scale_set = true;
}
resize(full_img, img, Size(), work_scale, work_scale);
}
if (!is_seam_scale_set)
{
seam_scale = min(1.0, sqrt(seam_megapix * 1e6 / full_img.size().area()));
seam_work_aspect = seam_scale / work_scale;
is_seam_scale_set = true;
}
(*finder)(img, features[i]);
features[i].img_idx = i;
LOGLN("Features in image #" << i 1 << ": " collectGarbage();
full_img.release();
img.release();
LOGLN("Finding features, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
LOG("Pairwise matching");
#if ENABLE_LOG
t = getTickCount();
#endif
vectorpairwise_matches;
BestOf2NearestMatcher matcher(try_gpu, match_conf);
matcher(features, pairwise_matches);
matcher.collectGarbage();
LOGLN("Pairwise matching, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
// Check if we should save matches graph
if (save_graph)
{
LOGLN("Saving matches graph...");
ofstream f(save_graph_to.c_str());
f << matchesGraphAsString(img_names, pairwise_matches, conf_thresh);
}
// Leave only images we are sure are from the same panorama
vectorindices = leaveBiggestComponent(features, pairwise_matches, conf_thresh);
vectorimg_subset;
vectorimg_names_subset;
vectorfull_img_sizes_subset;
for (size_t i = 0; i < indices.size(); i)
{
img_names_subset.push_back(img_names[indices[i]]);
img_subset.push_back(images[indices[i]]);
full_img_sizes_subset.push_back(full_img_sizes[indices[i]]);
}
images = img_subset;
img_names = img_names_subset;
full_img_sizes = full_img_sizes_subset;
// Check if we still have enough images
num_images = static_cast(img_names.size());
if (num_images < 2)
{
LOGLN("Need more images");
return -1;
}
HomographyBasedEstimator estimator;
vectorcameras;
estimator(features, pairwise_matches, cameras);
for (size_t i = 0; i < cameras.size(); i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
LOGLN("Initial intrinsics #" << indices[i] 1 << ":\n" << cameras[i].K());
}
Ptradjuster;
if (ba_cost_func == "reproj") adjuster = new detail::BundleAdjusterReproj();
else if (ba_cost_func == "ray") adjuster = new detail::BundleAdjusterRay();
else
{
cout << "Unknown bundle adjustment cost function: '" << ba_cost_func setConfThresh(conf_thresh);
Mat_refine_mask = Mat::zeros(3, 3, CV_8U);
if (ba_refine_mask[0] == 'x') refine_mask(0,0) = 1;
if (ba_refine_mask[1] == 'x') refine_mask(0,1) = 1;
if (ba_refine_mask[2] == 'x') refine_mask(0,2) = 1;
if (ba_refine_mask[3] == 'x') refine_mask(1,1) = 1;
if (ba_refine_mask[4] == 'x') refine_mask(1,2) = 1;
adjuster->setRefinementMask(refine_mask);
(*adjuster)(features, pairwise_matches, cameras);
// Find median focal length
vectorfocals;
for (size_t i = 0; i < cameras.size(); i)
{
LOGLN("Camera #" << indices[i] 1 << ":\n" << cameras[i].K());
focals.push_back(cameras[i].focal);
}
sort(focals.begin(), focals.end());
float warped_image_scale;
if (focals.size() % 2 == 1)
warped_image_scale = static_cast(focals[focals.size() / 2]);
else
warped_image_scale = static_cast(focals[focals.size() / 2 - 1] focals[focals.size() / 2]) * 0.5f;
if (do_wave_correct)
{
vectorrmats;
for (size_t i = 0; i < cameras.size(); i)
rmats.push_back(cameras[i].R.clone());
waveCorrect(rmats, wave_correct);
for (size_t i = 0; i < cameras.size(); i)
cameras[i].R = rmats[i];
}
LOGLN("Warping images (auxiliary)... ");
#if ENABLE_LOG
t = getTickCount();
#endif
vectorcorners(num_images);
vectormasks_warped(num_images);
vectorimages_warped(num_images);
vectorsizes(num_images);
vectormasks(num_images);
// Preapre images masks
for (int i = 0; i < num_images; i)
{
masks[i].create(images[i].size(), CV_8U);
masks[i].setTo(Scalar::all(255));
}
// Warp images and their masks
Ptrwarper_creator;
#if defined(HAVE_OPENCV_GPU)
if (try_gpu && gpu::getCudaEnabledDeviceCount() > 0)
{
if (warp_type == "plane") warper_creator = new cv::PlaneWarperGpu();
else if (warp_type == "cylindrical") warper_creator = new cv::CylindricalWarperGpu();
else if (warp_type == "spherical") warper_creator = new cv::SphericalWarperGpu();
}
else
#endif
{
if (warp_type == "plane") warper_creator = new cv::PlaneWarper();
else if (warp_type == "cylindrical") warper_creator = new cv::CylindricalWarper();
else if (warp_type == "spherical") warper_creator = new cv::SphericalWarper();
else if (warp_type == "fisheye") warper_creator = new cv::FisheyeWarper();
else if (warp_type == "stereographic") warper_creator = new cv::StereographicWarper();
else if (warp_type == "compressedPlaneA2B1") warper_creator = new cv::CompressedRectilinearWarper(2, 1);
else if (warp_type == "compressedPlaneA1.5B1") warper_creator = new cv::CompressedRectilinearWarper(1.5, 1);
else if (warp_type == "compressedPlanePortraitA2B1") warper_creator = new cv::CompressedRectilinearPortraitWarper(2, 1);
else if (warp_type == "compressedPlanePortraitA1.5B1") warper_creator = new cv::CompressedRectilinearPortraitWarper(1.5, 1);
else if (warp_type == "paniniA2B1") warper_creator = new cv::PaniniWarper(2, 1);
else if (warp_type == "paniniA1.5B1") warper_creator = new cv::PaniniWarper(1.5, 1);
else if (warp_type == "paniniPortraitA2B1") warper_creator = new cv::PaniniPortraitWarper(2, 1);
else if (warp_type == "paniniPortraitA1.5B1") warper_creator = new cv::PaniniPortraitWarper(1.5, 1);
else if (warp_type == "mercator") warper_creator = new cv::MercatorWarper();
else if (warp_type == "transverseMercator") warper_creator = new cv::TransverseMercatorWarper();
}
if (warper_creator.empty())
{
cout << "Can't create the following warper '" << warp_type << "'\n";
return 1;
}
Ptrwarper = warper_creator->create(static_cast(warped_image_scale * seam_work_aspect));
for (int i = 0; i < num_images; i)
{
Mat_K;
cameras[i].K().convertTo(K, CV_32F);
float swa = (float)seam_work_aspect;
K(0,0) *= swa; K(0,2) *= swa;
K(1,1) *= swa; K(1,2) *= swa;
corners[i] = warper->warp(images[i], K, cameras[i].R, INTER_LINEAR, BORDER_REFLECT, images_warped[i]);
sizes[i] = images_warped[i].size();
warper->warp(masks[i], K, cameras[i].R, INTER_NEAREST, BORDER_CONSTANT, masks_warped[i]);
}
vectorimages_warped_f(num_images);
for (int i = 0; i < num_images; i)
images_warped[i].convertTo(images_warped_f[i], CV_32F);
LOGLN("Warping images, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
Ptrcompensator = ExposureCompensator::createDefault(expos_comp_type);
compensator->feed(corners, images_warped, masks_warped);
Ptrseam_finder;
if (seam_find_type == "no")
seam_finder = new detail::NoSeamFinder();
else if (seam_find_type == "voronoi")
seam_finder = new detail::VoronoiSeamFinder();
else if (seam_find_type == "gc_color")
{
#if defined(HAVE_OPENCV_GPU)
if (try_gpu && gpu::getCudaEnabledDeviceCount() > 0)
seam_finder = new detail::GraphCutSeamFinderGpu(GraphCutSeamFinderBase::COST_COLOR);
else
#endif
seam_finder = new detail::GraphCutSeamFinder(GraphCutSeamFinderBase::COST_COLOR);
}
else if (seam_find_type == "gc_colorgrad")
{
#if defined(HAVE_OPENCV_GPU)
if (try_gpu && gpu::getCudaEnabledDeviceCount() > 0)
seam_finder = new detail::GraphCutSeamFinderGpu(GraphCutSeamFinderBase::COST_COLOR_GRAD);
else
#endif
seam_finder = new detail::GraphCutSeamFinder(GraphCutSeamFinderBase::COST_COLOR_GRAD);
}
else if (seam_find_type == "dp_color")
seam_finder = new detail::DpSeamFinder(DpSeamFinder::COLOR);
else if (seam_find_type == "dp_colorgrad")
seam_finder = new detail::DpSeamFinder(DpSeamFinder::COLOR_GRAD);
if (seam_finder.empty())
{
cout << "Can't create the following seam finder '" << seam_find_type find(images_warped_f, corners, masks_warped);
// Release unused memory
images.clear();
images_warped.clear();
images_warped_f.clear();
masks.clear();
LOGLN("Compositing...");
#if ENABLE_LOG
t = getTickCount();
#endif
Mat img_warped, img_warped_s;
Mat dilated_mask, seam_mask, mask, mask_warped;
Ptrblender;
//double compose_seam_aspect = 1;
double compose_work_aspect = 1;
for (int img_idx = 0; img_idx < num_images; img_idx)
{
LOGLN("Compositing image #" 0)
compose_scale = min(1.0, sqrt(compose_megapix * 1e6 / full_img.size().area()));
is_compose_scale_set = true;
// Compute relative scales
//compose_seam_aspect = compose_scale / seam_scale;
compose_work_aspect = compose_scale / work_scale;
// Update warped image scale
warped_image_scale *= static_cast(compose_work_aspect);
warper = warper_creator->create(warped_image_scale);
// Update corners and sizes
for (int i = 0; i < num_images; i)
{
// Update intrinsics
cameras[i].focal *= compose_work_aspect;
cameras[i].ppx *= compose_work_aspect;
cameras[i].ppy *= compose_work_aspect;
// Update corner and size
Size sz = full_img_sizes[i];
if (std::abs(compose_scale - 1) > 1e-1)
{
sz.width = cvRound(full_img_sizes[i].width * compose_scale);
sz.height = cvRound(full_img_sizes[i].height * compose_scale);
}
Mat K;
cameras[i].K().convertTo(K, CV_32F);
Rect roi = warper->warpRoi(sz, K, cameras[i].R);
corners[i] = roi.tl();
sizes[i] = roi.size();
}
}
if (abs(compose_scale - 1) > 1e-1)
resize(full_img, img, Size(), compose_scale, compose_scale);
else
img = full_img;
full_img.release();
Size img_size = img.size();
Mat K;
cameras[img_idx].K().convertTo(K, CV_32F);
// Warp the current image
warper->warp(img, K, cameras[img_idx].R, INTER_LINEAR, BORDER_REFLECT, img_warped);
// Warp the current image mask
mask.create(img_size, CV_8U);
mask.setTo(Scalar::all(255));
warper->warp(mask, K, cameras[img_idx].R, INTER_NEAREST, BORDER_CONSTANT, mask_warped);
// Compensate exposure
compensator->apply(img_idx, corners[img_idx], img_warped, mask_warped);
img_warped.convertTo(img_warped_s, CV_16S);
img_warped.release();
img.release();
mask.release();
dilate(masks_warped[img_idx], dilated_mask, Mat());
resize(dilated_mask, seam_mask, mask_warped.size());
mask_warped = seam_mask & mask_warped;
if (blender.empty())
{
blender = Blender::createDefault(blend_type, try_gpu);
Size dst_sz = resultRoi(corners, sizes).size();
float blend_width = sqrt(static_cast(dst_sz.area())) * blend_strength / 100.f;
if (blend_width < 1.f)
blender = Blender::createDefault(Blender::NO, try_gpu);
else if (blend_type == Blender::MULTI_BAND)
{
MultiBandBlender* mb = dynamic_cast(static_cast(blender));
mb->setNumBands(static_cast(ceil(log(blend_width)/log(2.)) - 1.));
LOGLN("Multi-band blender, number of bands: " numBands());
}
else if (blend_type == Blender::FEATHER)
{
FeatherBlender* fb = dynamic_cast(static_cast(blender));
fb->setSharpness(1.f/blend_width);
LOGLN("Feather blender, sharpness: " sharpness());
}
blender->prepare(corners, sizes);
}
// Blend the current image
blender->feed(img_warped_s, mask_warped, corners[img_idx]);
}
Mat result, result_mask;
blender->blend(result, result_mask);
LOGLN("Compositing, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
imwrite(result_name, result);
result.convertTo(result,CV_8UC1);
imshow("stitch",result);
ttt = ((double)getTickCount() - ttt) / getTickFrequency();
cout << "总的拼接时间:" << ttt << endl;
waitKey(0);
LOGLN("Finished, total time: " << ((getTickCount() - app_start_time) / getTickFrequency()) << " sec");
return 0;
}
效果:

相关推荐
-
遥感图像处理步骤有哪些
遥感图像预处理是遥感应用的第一步,也是非常重要的一步.目前的技术也非常成熟,一般软件都具备这方面的功能,预处理的流程在各个行业.不同数据中有点差异,而且注重点也各有不同. 操作方法 01 第一步:几何 ...
-
如何用python拼接字符串,去空格
python拼接字符串有三种方法,每种方法的效率和使用的场景各不相同.python在处理字符串上有它自己的优势,简洁高效. 操作方法 01 直接用"+"进行拼接,优点是简洁,缺点是 ...
-
python实现K-means算法
k-means 算法接受参数 k :然后将事先输入的n个数据对象划分为 k个聚类以便使得所获得的聚类满足:同一聚类中的对象相似度较高:而不同聚类中的对象相似度较小.聚类相似度是利用各聚类中对象的均值所 ...
-
python冒泡排序算法怎么用
冒泡排序是一次比较两个元素,只要满足排序要求就把他们交换过来直至将整个序列排好序,下面来看一下我们的详细方法 操作方法 01 首先我们打开电脑上的python软件,如图所示: 02 现在我们来定义冒泡 ...
-
Python图像高级滤波基于信息熵的算法
图像处理是根据信息熵的方法来见局部滤波的一种方法,基本原理如下:求局部熵,熵是使用基为2的对数运算出来的.该函数将局部区域的灰度值分布进行二进制编码,返回编码的最小值.Python中有相关得到函数. ...
-
opencv官方教程中文版(python官方文档中文)
PyTorch 中文版官方教程来了.PyTorch 是近年来较为火爆的深度学习框架,然而其中文版官方教程久久不来.近日,一款完整的 PyTorch 中文版官方教程出炉,读者朋友可以更好的学习了解 Py ...
-
如何在VS2013下配置OpenCV
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,集成了大量的计算机视觉以及图像处理等方面的算法.这些算法都是基于C和C++的,并且提供了 ...
-
Python与sed,grep文本查找效率对比小测
Gnu awk作者在FreeBSD邮件列表中回答”GNU grep为什么比BSD grep要快“,提到了用到了Boyer-Moore算法,虽然不知道是什么,但感觉很厉害的样子~我猜想grep有多快呢? ...
-

如何在手机版简拼中拼接视频和照片
手机版简拼软件被很多人使用,用来拼接视频或者照片,那么如何将视频和照片拼接在一起呢?小编就来为大家介绍一下吧.具体如下:1. 第一步,点击并打开简拼软件,接着点击页面底部箭头所指的图标.2. 第二步 ...
